| Veranstalter |
Dr. Emmanuel Dean? and M.Sc. Caixia Cai |
| Modul |
IN2106 |
| Typ |
Masterpraktikum |
| Semester |
SS 2013 |
| ECTS |
10.0 |
| SWS |
6 |
| Time & Place |
Thursdays, at 14:00 in room 01.07.023 (starting 18. April. 2013) |
| Certificate |
successful completion of all exercises and final project |
| Registration |
By email to one of the organizers. Confirmation via TUMonline |
Course Materials
NOTICE: Please take a look on the date and time for the Praktikum.
Please send your exercises to praktikum.rmc.2012@gmail.com with the filename: exercises_sessionNumber_yourname.
If you have questions, please send an e-mail to Dr.
Emmanuel Dean? or M.Sc.
Caixia Cai.
Contents of the Lab Course
- Introduction to Robot Modelling (Kinematic and Dynamic modelling)
- DenavitHartenberg methodology to describe robot joint frames, position and velocity
- Robot Dynamics based on Euler-Lagrange
- Non-linear control for robots (Lyaponov based)
- Model free control
- Model based control (robot regressor approach)
- Impedance control (optional)
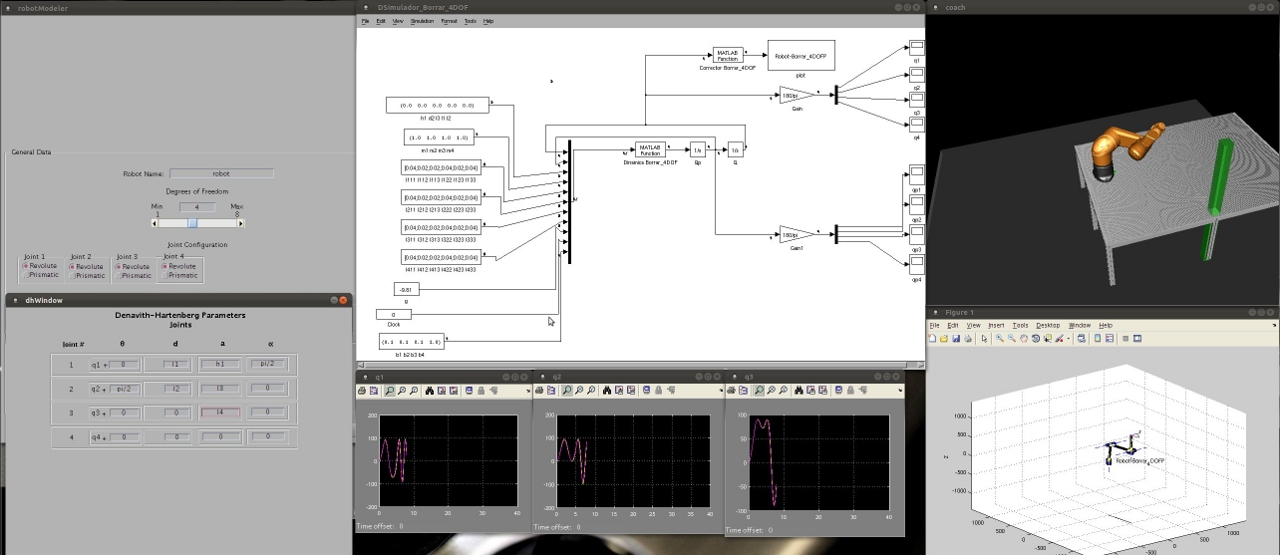
- Introduction to our Robot Modelling Toolbox using Matlab
General Information
- The course will be held in English language. The materials will also be in English.
- The number of possible participants is 12.
Prerequisites for the Praktikum
- Strong Mathematical background in Linear Algebra, Trigonometry and Calculus
- Basic knowledge in robotics (preferred)
- All the exercises will be implemented on ubuntu, please bring your laptop installed with ubuntu (>=11.04)
- Matlab (preferably installed on a laptop)
Literature
-
[Corke11]
-
Peter Corke.
Robotics, Vision and Control - Fundamental Algorithms in
MATLABè, volume 73 of Springer Tracts in Advanced Robotics.
Springer, 2011.
-
[SpongEtal06]
-
M.W. Spong, S. Hutchinson, and M. Vidyasagar.
Robot modeling and control.
John Wiley & Sons, 2006.
[ http ]
-
[Craig05]
-
J.J. Craig.
Introduction to robotics: mechanics and control.
Addison-Wesley series in electrical and computer engineering: control
engineering. Pearson/Prentice Hall, 2005.
[ http ]